
Peter Pan in NeverLand
[레고 MOC] ARF-03 (스압) 본문
2020.11.25 - [오래된 열정/기타] - [레고] ARF-03 제작기 #01
[레고] ARF-03 제작기 #01
레고를 어떻게 즐겨야 하는가? 어떻게 보면 특징없는 작고 네모난 부품들이 모여서, 집도 만들어지고, 자동차도 만들어지고, 심지어 캐릭터도 만들어지는 것이 레고이다. 레고는 여자친구를 제
yihas.tistory.com
2020.12.28 - [오래된 열정/기타] - [레고] ARF-03 제작기 #02
[레고] ARF-03 제작기 #02
2020/11/25 - [오래된 열정/기타] - [레고] ARF-03 제작기 #01 [레고] ARF-03 제작기 #01 레고를 어떻게 즐겨야 하는가? 어떻게 보면 특징없는 작고 네모난 부품들이 모여서, 집도 만들어지고, 자동차도 만들
yihas.tistory.com
2021.01.29 - [오래된 열정/기타] - [레고] ARF-03 제작기 #03
[레고] ARF-03 제작기 #03
2020/11/25 - [오래된 열정/기타] - [레고] ARF-03 제작기 #01 [레고] ARF-03 제작기 #01 레고를 어떻게 즐겨야 하는가? 어떻게 보면 특징없는 작고 네모난 부품들이 모여서, 집도 만들어지고, 자동차도 만들
yihas.tistory.com
최종 작업기에서 완성 리뷰를 올리기까지 4개월이 넘는 시간이 걸렸다. 그 사이에 이사가 예정되어 있었고, 그로 인해서 내 수집품들을 잠시 피신시키는 것이 나에게 가장 중요한 작업이었다. 이사 후에는 피신한 수집품들을 다시 가져오고, 새롭게 바뀐 환경에 맞게 짐들을 정리하는 일로 시간이 꽤 필요했다.
게다가 이사하기 위해서 ARF-03을 분해했는데, 이사 후 다시 조립하는 과정에서 몇몇 부품이 벌크들에 섞여서 재완성이 미뤄졌다...;; 그리고 나름 제대로 사진을 찍고 싶었는데, 바뀐 환경에서 적절한 스튜디오 환경도 마련하지 못하는 등, 곡절이 좀 많았다....ㅠㅜ
....
하지만 다른 그 어떤 원인보다 내가 게으른 인간이라는 것이 가장 큰 걸림돌이다...^^;;;
아무튼 이제 이전 작업기를 보고 혹여나 관심을 가졌을 사람들마저 지쳐 나가떨어졌을만한 시점이 되어서야, 겨우 완성된 ARF-03의 리뷰를 올린다. 들어가면서 먼저 밝히자면, ARF-03은 나에게 감동이었다...ㅠㅜ 올해 내가 만든 것들과 만들 것들을 모두 포함해도 이만큼의 감동을 줄 수 있는 모델은 없을 것 같다.
이제 ARF-03(Advanced Robot Fighter-03)의 리뷰로 이 감동을 전달하고 싶다.

먼저 이 모델의 시발점이 되어준 레고 조립 어플 +L에 소개된 원래 모델인 BRF-01Eagle의 사진.

그리고 내가 어레인지한 ARF-03의 정면 모습. 구도가 다르고 전체적인 이미지가 비슷해서 무엇이 다른지 한눈에 안 들어올 수도 있지만, 기본적으로 내가 어레인지한 모델이 좀 더 크고 길쭉하다. 개인적으로는 좀 더 나은 프로포션이 되었다고 평가.

공식 사진에는 제대로 된 측면 샷이 없어서 비교가 어려운데, 측면 샷을 놓고 보면 역시 ARF-03이 확실히 더 나은 프로포션이라는 것이 느껴질 수 있었을 듯하다. 일단 팔, 다리의 라인을 수정한 것이 가장 마음에 든다...ㅎㅎㅎ

정면 샷에서는 잘 느껴지지 않는데, 뒷모습을 찍은 사진을 보면 좀 짤뚱한 느낌이 있다. 처음에 사진을 봤을 때는 이런 느낌을 못 받았는데, 작업이 진행되면서 내내 아쉬움을 느꼈고, 그 덕분에 ARF-03으로 발전시킬 수 있었다.

위의 사진과 비교해보면 확실히 늘씬해진 프로포션을 느낄 수 있다. 프로포션은 좀 더 나아졌다고 평가하지만, BRF-01Eagle을 만들려고 하던 중에 방향을 선회한 것이라서 전체적인 인상은 비슷하다. 하지만, 제작기 중간중간 밝힌 것처럼 머리부터 발끝까지 원래 형태 그대로 따라간 부분은 거의 없다. 등과 허벅지의 부스터를 제외하면 어떤 식으로든 조금씩 다 다르게 만들었고, 사실 사이즈를 조정하면서 다르게 만들 수밖에 없었던 측면도 있다.^^; 전체적으로 원래의 인상은 유지하면서 내가 원하는 스타일에 맞게 부분 수정을 한 것이 최종 완성된 ARF-03이다.

레고로 만든 로봇답게 직선이 주를 이루는 라인에 날씬하지만 결코 마른 느낌은 아니다. 그래서 만들어놓고, 순전히 자뻑에 불과하지만, 어딘가 예전 Five Star Stories의 모터 헤드가 연상되지 않을까 하는 생각도 했다.

제멋대로 모터 헤드를 연상한 이유는 날씬한 느낌을 주는 허리 부분 때문인데, 허리라인에서 골반 라인이 매끄럽게 연결되지 않고 갑자기 골반이 툭 튀어나오기 때문에 이런 인상을 주는 듯하다. 처음에는 골반으로 연결되는 라인을 어떻게 한번 만들려고 했는데, 고관절 가동에 방해가 되어서 그냥 포기해 버렸다. 원래 골반이 넓은 디자인이었고, 내가 어레인지를 하면서 어깨까지 넓어졌지만, 허리는 원래 폭 그대로라 허리 부분이 상대적으로 훨씬 날씬하게 느껴지게 되었다.

BRF-01의 머리는 굉장히 스타일리시한 편이다. 얼굴을 보고 반했다고 해도 좋을 정도. 그런데 턱 부분이 좀 아쉬웠다. 그리고 카메라아이도 사진과는 달리 실제로 만들었을 때 약간 허전한 부분이 생기는 것도 고치고 싶었다. 전체적인 인상과 아이디어는 계승하면서 나만의 어레인지가 가능하지 않을까. 레고니까 수정이 가능하잖아.

머리를 수정해보려고 이런저런 시도를 해보았는데, 모두 실패하고 결국 무난한 머리로 마무리지었다. 부품의 크기와 비율 등을 고려해보면, 아직은 이 정도가 내 한계가 아닌가 싶다. 레고 창작 로봇을 찾아보면 더 작은 크기에서도 독창적이면서 멋진 머리를 만드는 사람이 많은데, 나는 이 크기에서 원래의 특징을 살리면서 독창적인 머리를 만들어내기가 무척 어려웠다. 사실 스튜디오를 이용해서 나름 괜찮은 머리 몇 개를 만들어내긴 했지만, ARF-03의 포인트를 담아내지 못해서 포기. 다음번 레고 로봇에 적용할 수 있으면 좋겠다.
가슴을 늘리고 어깨의 장식을 조금 수정하고, 팔과 어깨의 기믹을 수정하는 등 상체부터 이런저런 변경점이 많다. 특히 좌우 회전만 가능하던 허리에 앞뒤로 움직일 수 있는 관절을 심었는데... 가동성은 기대 이하...; 그냥 기믹이 있다 정도의 수준과 적당한 프로포션이 나온 것으로 만족하는 수준. 작업기에서 이야기했던 것처럼 가슴을 좌우로 넓히면서 어깨 관절 기믹을 수정할 수밖에 없었는데, 기믹도 살리고 강도도 확보하고, 만족스러운 결과가 되었다.

작업기에서도 알 수 있듯이 가장 공을 많이 들인 부분이 하체다. 레고 부품의 크기가 정해져 있기 때문에 수정할 수 있는 범위의 한계가 있었고, 기믹을 살리면서 프로포션을 바꾸기 위해서는 기존의 결합 방식을 변경해야만 했다. 이런저런 곡절이 있었지만, 어쨌든 결과는 대만족!!
이제 가동성을 확인해볼 차례다.

이중 관절이 아니기 때문에 완전 접힘까지는 안 되지만, 팔, 다리, 고관절까지 모두 90도 이상의 가동성을 확보하고 있다. 그런데 이 사진에서 내가 제일 놀랐던 포인트는 가동성이 아니라 관절 강도다. 다리를 저렇게 올리고 버티고 있다. 균형을 잡는 것이 관건이긴 하지만, 별도의 지지대가 조치 없이 저런 자세가 가능하다니!! 이 자세를 잡고 내가 얼마나 감동을 받았는지 알 수 있는 사람이 있을까?
원래 BRF-01Eagle의 크기가 머리의 안테나까지 포함해서 30cm라고 소개하고 있다. 그런데 나는 허벅지, 종아리부터 허리까지 모두 기존보다 1 스터드 이상씩 늘렸기 때문에 30cm를 이미 넘는 사이즈. 이전에 만들었던 AW-09보다 크고, WM-20보다 당연히 더 크다. 그런데 관절 강도는 두 모델보다 더 좋다!! 어떻게 이럴 수가!!

각 부의 관절들은 기본적으로 라쳇 관절을 적용하고 있다. 라쳇 관절인 만큼 미묘한 조절이 안 된다는 아쉬움은 있지만, 충분히 감안할 수 있는 정도의 수준이고, 무엇보다 기본 사이즈가 크기 때문에 라쳇 관절이 아닐 경우 무게를 버티기 어려웠을 것이다.

가동성을 최대한 확보하기 위해서 관절 구조를 ㅡ자 구조가 아닌 ㄴ구조로 만들었지만, 크기가 큰 편이라 관절의 어색함을 줄여줄 수 있는 디자인 공간이 확보되었다. 메카닉 창작에서는 관절 구조와 강도, 크기, 디자인을 모두 한 번에 고려해야 한다는 걸 배웠다.

그런데 이 부분은 AW-09와 비교해서 그렇게 크게 감동을 준 부분은 아니었다. 가동성을 확보하기 위해 고민이 필요하긴 하지만 팔, 다리의 관절은 기본적으로 접히는 것이 전부이고 하중을 크게 받는 부분도 아니다. 내 경험에서 가동성과 강도, 거기에 프로포션까지 모두 확보하기 가장 어려운 위치는 고관절과 발목 관절이었다.

이 난관을 해결하기 위해 BRF-01과 ARF-03는 멋진 해법을 제시하고 있다.
먼저 허벅지에 있는 부스터로 추정되는 액세서리. 이 액세서리는 단순히 멋을 위해서 달아놓은 것이 아니다.

부스터는 다리에 붙어있는 것이 아니라 별도의 독립된 부분이다. 기본적으로 다리와 몸통이 볼 관절로 연결되어 있고, 부스터에도 볼 관절이 있어서 몸통 - 다리 - 부스터 - 몸통 세 부분이 삼각형 구조로 서로서로 연결되어 있다.

부스터는 몸통과 다리 양쪽에 볼 관절로 연결되어 있어서 가동에 크게 간섭하지 않는다. 또한 고관절이 결과적으로 볼 관절 2개로 연결되어서 볼 관절 1개에 비해 월등한 강도를 확보할 수 있다.
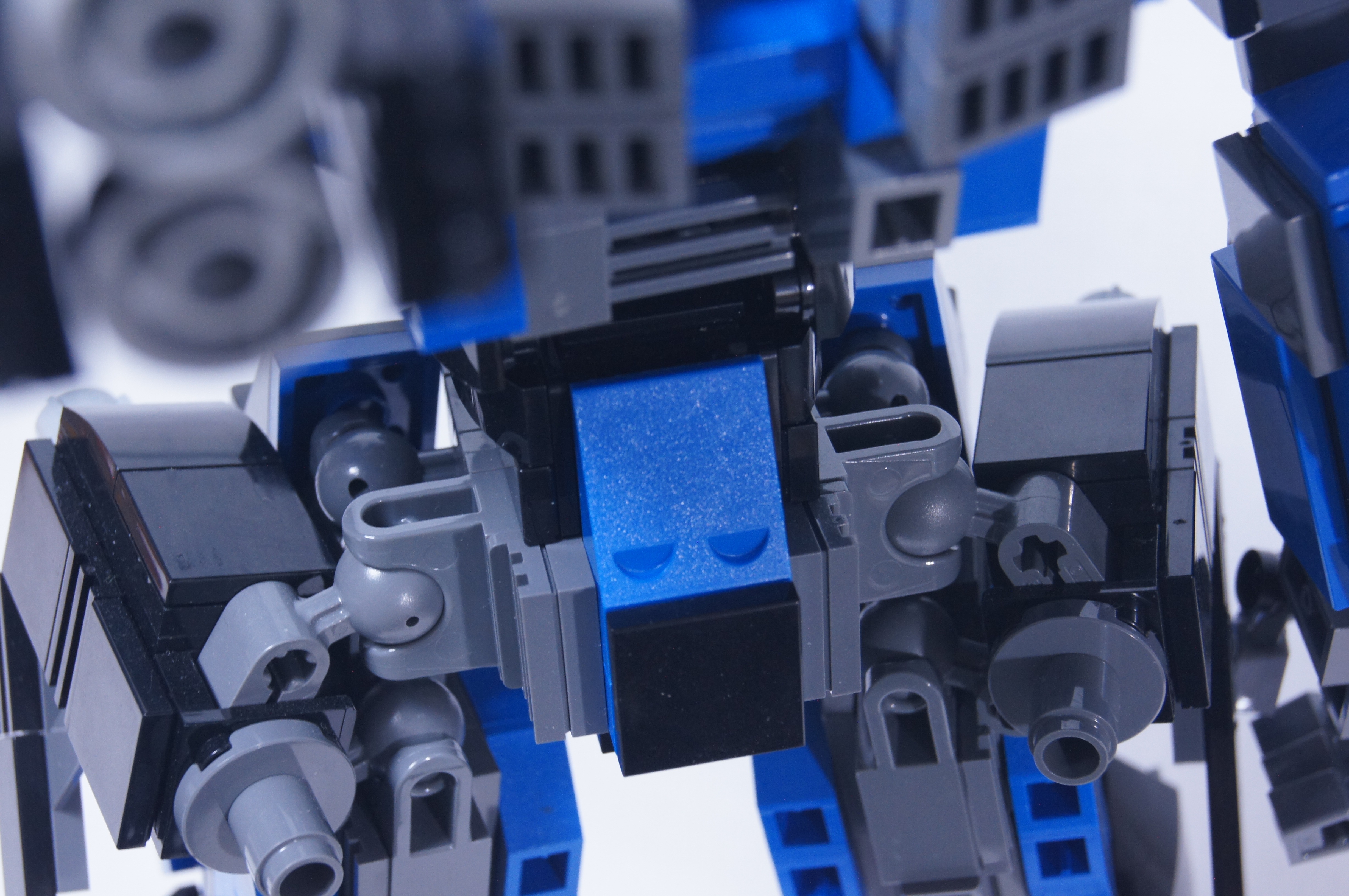
고관절은 회전과 접힘을 동시에 수행하는 역할이 필요하면서, 상체의 하중을 버텨야 하는데, 이런 식의 이중 관절로 가동성과 강도를 모두 확보한 것. 스튜디오 상에서는 구조의 독특함 정도만 파악이 가능한 수준이었고, 과연 이 관절이 어느 정도의 가동성을 확보하는지, 어느 정도의 강도를 가지고 있는지 판단할 수 없었다. 하지만, 실제작 후에 직접 만져봤을 때는 이 관절의 성능에 대해서 그저 감동만 할 뿐이었다. 이 구조 덕분에 ARF-03은 지금까지 제작한 창작품 중에 가장 크면서 가장 확실한 강도를 가지고 있다.

발목은 고관절에 비해서 상대적으로 더 직관적이고 단순한 이중 볼관절 구조다. 뒤쪽 볼 관절의 움직임을 확보하기 위한 결합 구조는 메카적인 느낌을 주면서 강도와 가동성을 동시에 확보한 굉장한 설계라고 생각한다. 내 머리에서는 죽어도 안 나왔을 듯. ㅋ

어깨는 볼관절을 사용하지 않고 축관절만을 이용해서 상하좌우의 가동을 모두 확보하고 있다. 큰 공간을 단순히 메꾸는 것이 아니라 기믹을 넣을 공간으로 사용해서, 가동성과 강도를 확보했다. 메카닉 창작에 있어서 배울 것이 많은 작품이다.

가동 범위가 넓고, 관절 강도가 좋으니 자세를 잡을 때 스트레스가 적었다. 놀이성이 확 올라간 것이다. 물론 아이들이 장난감처럼 가지고 놀 수 있는 수준은 아니지만, 다리 자세를 잡는 와중에 상체가 뒤로 넘어가거나 자세를 잡아서 지면에 올렸더니 관절이 못 버텨서 쓰러지는 일은 거의 없었다. 레고 메카닉은 레고 관절의 강도 때문에 아주 작은 사이즈로 가거나 완전히 큰 사이즈로 가서 관절에 기어 등을 심을 수밖에 없다고 생각했는데, 완전히 잘못 생각하고 있던 것이다. 역시 세상은 넓고, 괴수는 널려 있다. ㅋㅋ

허리는 라쳇 관절을 이용해서 원본에는 없는 관절을 넣었다... 정도만 이야기할 수 있을 듯...;;; 위의 사진에서 보듯이 그냥 살짝 움직이는 수준으로 효과적인 기믹은 아니다... 그래도 강도도 괜찮고, 프로포션도 나쁘지 않아서 그걸로 만족...^^;

등의 부스터는 원래 형태 그대로 사용했다. 덩치가 커진 만큼 상대적으로 크기가 작게 보이기는 하지만, 전체적인 비율이 무너지는 정도는 아니라서 특별히 수정하진 않았다. 가동이 꽤 자유로운 편이라 두꺼운 어깨 장갑을 피해서 배치할 수 있다. 여러모로 가동에 신경을 많이 쓴 디자인이다.

가동성 평가의 기본이라는 무릎 앉아 자세는 기본이다. 허벅지에 올린 손까지, 가동성과 프로포션 모두가 잘 맞아서 굉장히 자연스러운 자세가 구현된다. 진짜 우왕 굿.

사실 무릎 앉아는 관절 강도보다 가동성 체크에 더 의미가 있긴 하다. 관절 강도가 안 좋아도 무게 중심이 낮고 다리 관절이 최대한의 범위로 굽힌 상태이기 때문에 부품이 분리만 되지 않으면 가동 범위만으로 이 자세는 커버가 된다.

별도의 액세서리는 라이플 한 정이 전부. 라이플 디자인은 총열 정도만 살짝 수정한 것으로 원본에서 크게 달라진 점은 없다. 저 총열 부품 하나를 저렴하게 구해보려고 브릭링크 셀러를 얼마나 찾고 또 찾았는지... 결국 적당한 셀러는 못 찾고 가지고 있는 벌크로 겨우 해결할 수 있었다...^^;;

총열이 더 길면 땅에 닿을 듯 늘어질 것 같아서 현재 수준에서 만족했는데, 사진을 계속 보다 보니 좀 더 길어도 괜찮았겠다 싶긴 하다...^^;; 이건 돌격용 소총 개념으로 사용하고 나중에 저격용 라이플같은 걸 만들어 볼까 하다가... 다른 만들 것들이 쌓여서 그만두어야겠다고 빠른 포기. ㅋㅋㅋ

라이플의 방아쇠처럼 보이는 부분이 손의 구멍에 결합되는 방식으로 손에 쥐어줄 수 있다. 가동형 손의 관절 강도가 아주 약한 편은 아니어서 그냥 쥐어줘도 막 떨어지거나 하진 않겠지만, 이런 기믹 덕분에 더 확실히 고정이 된다. 여러모로 놀이성이 상당히 높은 작품이다. 원본인 BRF-01Eagle이 그렇다. 내가 새로 넣은 기믹은 없다니깐... ^^;

우수한 가동성과 관절 강도 덕분에 자세를 잡기가 매우 수월하고 재미있다. 자세를 바꾸면서 쓰러지지 않을까 하는 고민없이 레고 로봇의 자세를 잡을 수 있다니!!!

어깨부터 팔을 거쳐 손까지 모든 관절 가동이 가능해서 양손으로 총을 쥐는 것 자세도 매우 자연스럽게 연출이 된다. 라이플의 결합력도 좋아서 반대쪽 손 자세를 잡는 것도 무척 수월했다. 이건 만져보면 바로 알 수 있는 건데... 이 쾌적함을 글로 제대로 전달하지 못하는 내 문장력이 아쉬울 따름.

게다가 큰 사이즈에 오는 존재감이 엄청나다. 30cm면 건프라에서 PG급인 셈으로, 나는 지금까지 프라모델을 하면서 PG를 직접 만들어 본 적이 없는데 사람들이 왜 PG, PG 하는지 이 모델을 만들면서 알게 되었다. 크기만 큰 것이 아니라, 큰 사이즈의 곳곳을 허전하지 않게 메꿔놓은 디자인도 새삼 굉장하다는 생각이 든다.

이번에 사진을 정리하면서 개인적으로 생각하는 베스트 샷. 역시 사진이 잘 나오려면 모델이 좋아야한다..^^;

거치할 수 있는 베이스를 만들었다면 좀 더 많은 액션 샷을 찍을 수 있었겠지만... 이 무게를 견딜 베이스를 만드는 것도 만만치 않을 것 같고, 베이스가 있어도 사진 찍는 것도 만만치 않은 작업이라.... ㅎㅎㅎ 거기다 글도 이미 충분히 길다.
액션 샷은 이쯤에서 마무리.

멋진 디자인, 넓은 가동 범위, 짱짱한 관절 강도, 큰 사이즈... 뭐 하나 부족함이 없다고 해도 좋을 정도의 레고 로봇 ARF-03. 메카닉 창작에서 다른 사람들의 아이디어를 배우기 위해 시작한 작업이었는데, 결과물이 너무나 만족스럽게 나왔다. 이게 꼭 좋은 것은 아닌게 이 작품에 대한 만족도가 너무 높아서 이후의 작업에 대한 텐션이 좀 떨어진 상황...;; 이제는 나만의 창작을 하고 싶은데 영 성에 안 찬다고 할까. ARF-03을 베이스로 그냥 디자인만 좀 수정한 버전에 대한 미련만 자꾸 생기니...;; 하지만 그래봐야 겨우 색놀이 정도의 변형일 따름이고 그런 것보다 나만의 독창적인 작품에 대한 욕심을 채울 수도 없고.... 끄응....;;;
엄청난 만족감과 약간의 후유증을 남긴 ARF-03의 이야기는 이것으로 끝이다. 레고 메카닉의 세계는 내가 생각한 것보다 훨씬 엄청나다는 걸 직접적으로 깨닫게 해준 경험이었다. 레고는 프라모델같은 수준의 결과물이 어렵다는 내 낮은 생각을 단박에 깨버렸다. 아니, 처음부터 레고와 프라모델을 비교해서 판단한 것부터가 잘못이다. 각각 장단점이 분명히 있고, 다만 레고에서는 열심히 고민하고, 좋은 아이디어를 통해 충분히 만족스러운 작품이 가능하다는 깨달았다.

이제 남은 숙제는, BRF-01Eagle을 만들려고 하다가 ARF-03로 전환하면서 남은 벌크들을 어떻게 다른 창작에 써먹을까 하는 것...;;;; 이래서야 부품을 효율적으로 사용할 수 있는 스튜디오를 바탕으로 작업했다고 말하기가....-ㅂ-;;;;
'즐기는 것 > 기타' 카테고리의 다른 글
| 그것은, 좋은, 물건이다(1/2) - 스파맥스 아우라 AC-500 (13) | 2021.08.30 |
|---|---|
| [기타] 레고 재고 정리!! ... 하는 김에 플렉스!! (9) | 2021.08.03 |
| [기타] 장식장 2021 (2) | 2021.05.11 |
| [레고] 마인크래프트 크리퍼 광산 #21155 (6) | 2021.05.03 |
| [기타] 스프레이 부스 자바라 뚜껑 만들기 (5) | 2021.04.23 |



